Forschende entwickeln Marsrover nach Vorbild der Natur
Forschende der Universität Würzburg haben gemeinsam mit Partnern aus Bremen einen Marsrover entwickelt, dessen Räder nicht rollen, sondern Schwimmbewegungen ausführen. Vorbild ist der Sandfisch, eine Saharaeidechse, die sich durch losen Sand bewegen kann.
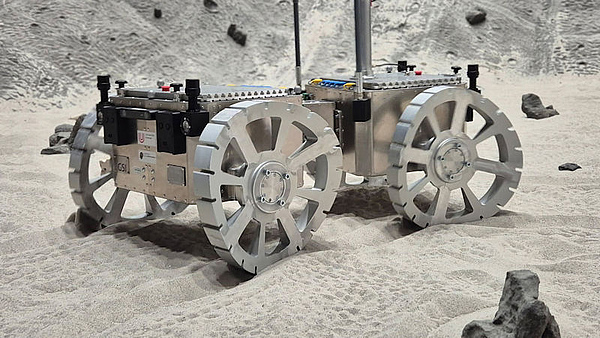
Bild: Marco Schmidt / Uni Würzburg
Einem Team aus Würzburg und Bremen ist es gelungen, einen neuartigen Marsrover zu entwickeln, dessen Räder nicht rollen, sondern eine Art Schwimmbewegung ausführen. Grundlage ist ein Prinzip aus der Natur, das Wissenschaftlerinnen und Wissenschaftler erst seit wenigen Jahren vollständig verstehen.
Weicher Boden als altes Problem
Wer einen Rover auf dem Mars bewegt, kämpft ständig mit dem Untergrund. Sand, Geröll und unebenes Gelände stellen herkömmliche Räder vor erhebliche Probleme: Sie rutschen, sinken ein oder verlieren die Traktion. Das ist kein rein theoretisches Problem. Der NASA-Rover Spirit blieb 2009 endgültig in weichem Marsboden stecken und konnte nicht befreit werden. Bisherige Radkonstruktionen sind meist auf niedrige Geschwindigkeiten ausgelegt, kommen aber mit lockerem, körnigem Untergrund grundsätzlich schlecht zurecht.
Genau hier setzt das Team um Marco Schmidt, Professor für eingebettete Systeme und Sensoren an der Universität Würzburg, an. Die Lösung kam nicht aus dem Labor, sondern aus der Sahara.
Räder, die wie eine Eidechse schwimmen
Der Sandfisch, eine in Nordafrika heimische Eidechse, kann sich in lockerem Sand eingraben und durch ihn hindurchbewegen, als wäre der Boden flüssig. Dieses Fortbewegungsprinzip, das lange kaum verstanden war, haben die Würzburger Forschenden technisch übersetzt: Die neuen Räder ihres Rovers erzeugen beim Fahren ähnliche Kräfte wie die Eidechse beim Schwimmen, sowohl nach vorne als auch zur Seite. Im Sand hinterlässt das Fahrzeug dabei wellenförmige Spuren, ein Zeichen dafür, dass der Mechanismus tatsächlich funktioniert.
Getestet wurde der Rover in Kooperation mit dem Deutschen Forschungszentrum für Künstliche Intelligenz und der Universität Bremen, sowohl auf Sandflächen als auch im Freiland. Die Stabilität auf lockerem Untergrund konnte dabei überzeugend nachgewiesen werden.
Die ersten Prototypen offenbarten allerdings auch Schwächen: Die Räder waren schwerer und schmaler als herkömmliche Luftreifen, was den Druck auf den Boden erhöhte und das Einsinken des Rovers begünstigte. Das verschlechterte die Steuerbarkeit erheblich. Durch eine Verbreiterung der Räder und eine Reduzierung ihrer Masse ließ sich dieses Problem deutlich entschärfen. Stabilität und Lenkverhalten verbesserten sich spürbar.
Als nächstes wollen die Forschenden nicht nur die Räder weiter verfeinern, sondern auch die Steuerungssoftware des Rovers intelligenter machen. Künftige Systeme sollen Rutschen und Einsinken vorausberechnen und automatisch gegensteuern. Das Projekt ist Teil der VaMEx-Initiative des Deutschen Zentrums für Luft- und Raumfahrt.
Quelle: https://www.uni-wuerzburg.de/aktuelles/einblick/single/news/sandfisch-marsrover/