Im Studierendenprojekt Intelligentes Fliegendes System (IFSys) entwickeln Studierende der TU-Berlin ein umbemanntes fliegendes System (UAS), bestehend aus Flugversuchsträger, Bodenstation und Bodenprüfstand.
Mehr Informationen auf der Webseite von IFSys.
Aktuelles
DGLR-Nachwuchsgruppe entwickelt Intelligentes Fliegendes System (IFSys)

Unbemannte fliegende Systeme – sie sind klein, ausgerüstet mit modernster Technik und werden dort eingesetzt, wo monotone Arbeiten oder für den Menschen gefährliche Umweltbedingungen vorliegen. Zivile Einsatzbereiche sind derzeit vor allem die Fernerkundung, die Inspektion von Industrieanlagen, die Bestimmung bio-physikalischer Bodenkenngrößen in der Land- und Forstwirtschaft, sowie Kurierdienste in entlegene Gebiete. Unbemannte fliegende Systeme können durch Piloten ferngesteuert werden, effektiver ist es hingegen wenn ein automatisches Flugregelungssystem die Kontrolle übernimmt. Der Pilot überwacht den Flug am Boden, um im Fehlerfall eingreifen zu können.
Das Studierendenprojekt IFSys (Intelligentes Fliegendes System) des Fachgebietes Flugmechanik, Flugregelung und Aeroelastizität (FMRA) am Institut für Luft- und Raumfahrt (ILR) der Technischen Universität Berlin wurde im Jahr 2006 gegründet. Es hat sich zur Aufgabe gemacht ein unbemanntes, fliegendes System (Unmanned Aerial System, UAS) bestehend aus einem Flugversuchsträger, einer Bodenstation, Funkmodems zur Datenübertragung und einem Bodenprüfstand selbstständig zu entwickeln. Das Hauptziel des Projektes ist es, die Ausbildung der Studierenden über die Vorlesungen hinaus zu verbessern. Daher wurden sowohl der Flugversuchsträger ALEXISevo, als auch Sensoren, die Bodenstation und der Bodenprüfstand selbst entwickelt. Die Deutsche Gesellschaft für Luft- und Raumfahrt (DGLR) unterstützt das Projekt seit Anfang 2014 als Nachwuchsgruppe.
Freiwillige Praxis im Studium
Aktuell beteiligen sich etwa 15 Studierende am Projekt. Es steht Studierenden verschiedener Fachrichtungen auf freiwilliger Basis offen. Zusätzlich zu den freiwilligen Projektbeiträgen wurden in den vergangenen Jahren zahlreiche Abschluss- und Studienarbeiten im Rahmen des Projektes verfasst. Sponsoren aus der Industrie unterstützen das Projekt durch Hard- und Software. Die Projektmitglieder werden von Prof. Robert Luckner und den wissenschaftlichen Mitarbeitern Alexander Köthe, Kai Loftfield, Georg Walde und Alexander Hamann vom Fachgebiet für Flugmechanik, Flugregelung und Aeroelastizität fachlich betreut.
Die Praxis bietet gute Chancen für das spätere Arbeitsleben. „Bisher gab es für IFSys Mitglieder keine Schwierigkeiten einen interessanten Arbeitgeber in der Industrie oder Forschung zu finden“, betont Luckner. Arbeitgeber ehemaliger Projektmitglieder sind unter anderem Airbus, das Deutsche Zentrum für Luft- und Raumfahrt (DLR), die Stemme AG oder auch die TU München und die TU Berlin.
Seenotrettung als Designmission
Mithilfe des UAS soll Forschung im Bereich Flugregelung, Avionik und Autonomie betrieben werden. Die Entwurfsmission ist eine abstrahierte Seenotrettungsmission: Der Flugversuchsträger soll ein Suchgebiet von etwa 500 mal 1.000 Meter in einer Höhe von 70 bis 100 Meter mit einer Geschwindigkeit von bis zu 72 Kilometern pro Stunde vollautomatisch abfliegen und ein farbiges Suchobjekt mit einer Kantenlänge von 40 mal 30 Zentimeter detektieren. Die Flugdauer beträgt mindestens 20 Minuten. Während des Fluges werden die Flugparameter auf der Bodenstation überwacht. Anschließend soll der Flugversuchsträger vollautomatisch landen.
Um diese Missionsaufgaben erfüllen zu können, wurden im Rahmen des Projektes die Flugversuchsträger ALEXIS und ALEXISevo (Airborne Laboratory for EXperiments on Inflight Systems - evolution) entwickelt. Beide sind druckpropellergetriebene Flugzeuge mit zwei Leitwerksträgern und umgedrehtem V-Leitwerk. Der aktuelle Versuchsträger ALEXISevo stellt eine im Rumpfausbau und dem Flugsteuerungssystem verbesserte Variante von ALEXIS dar. Das Flugzeug besitzt eine Spannweite von vier und eine Länge von zwei Metern. Angetrieben wird es von einem 1,5 Kilowatt Elektromotor, die Abflugmasse liegt bei 13,5 Kilogramm, zuzüglich einer Nutzlast von einem Kilogramm. Der Rumpf besteht aus glas- und kohlenstofffaserverstärktem Kunststoff. Der Flügel und das Leitwerk sind in einer Styropor-Abachi-Sandwichbauweise aufgebaut und mit Glasfasern verstärkt.
Entwicklung bis ins kleinste Detail
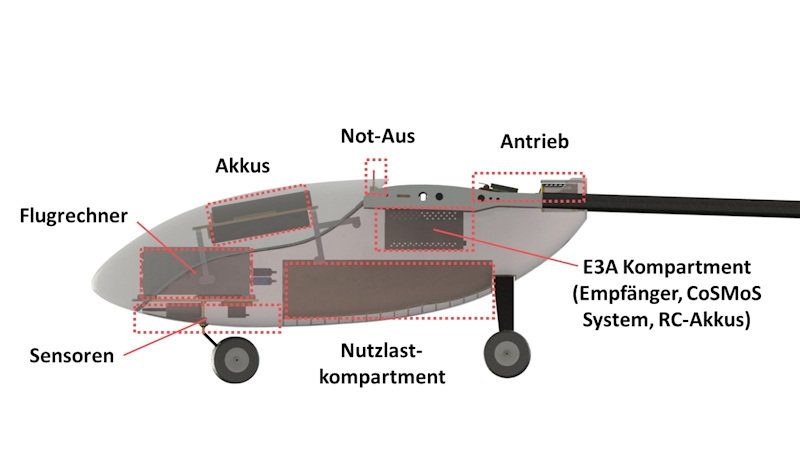
Für automatische Flüge verfügt der Versuchsträger über ein Flugsteuerungssystem. Dieses besteht aus einem Flugsteuerungsrechner (Flight Control Computer - FCC), Sensoren zur Ermittlung von Lage, Position, Anströmbedingungen (Luftdatensystem) und Klappenausschlägen (Hall-Effekt Sensoren), sowie Aktuatoren zur Ansteuerung der Steuerflächen. Zur aktiven Messung der Höhe über Grund besitzt AELXISevo zudem einen Ultraschall-, sowie Radar-Höhenmesser. Bis auf die Lage- und GPS-Sensoren wurde die gesamte Sensorik durch Projektmitglieder entwickelt.
Um einen sicheren Versuchsbetrieb zu gewährleisten, ist zusätzlich zum FCC eine manuelle Steuerung über zwei Fernsteuerungssysteme vorgesehen. Zwei Sicherheitspiloten am Boden sind jederzeit in der Lage die Kontrolle über das Fluggerät zu übernehmen. Die Umschaltung zwischen automatischem und manuellem Flug geschieht mithilfe eines eigens entwickelten Umschaltsystems (Command-Switch and Monitoring System - CoSMoS). Das Besondere hierbei ist, dass nach jedem ersten Fehler (z.B. Kabelbruch) eine Umschaltung auf den manuellen Flug durchgeführt wird. Wird beispielsweise eine Funkstrecke gestört, kann der Flugversuchsträger durch den zweiten Sicherheitspiloten gesteuert werden. Das Gesamtrisiko wird somit auch während der Flugerprobungsphase erheblich minimiert.
Zur Überwachung des Fluges und Fluggerätes, sowie zur Vorgabe neuer Wegpunkte wurde eine Bodenstation entwickelt. Neben der telemetrischen Erfassung der Zustandsdaten und deren Visualisierung können Befehle an den FCC übertragen werden. Zur Kommunikation werden zwei Funkmodems verwendet.
Flugversuche zur Prüfung des Simulationsmodels
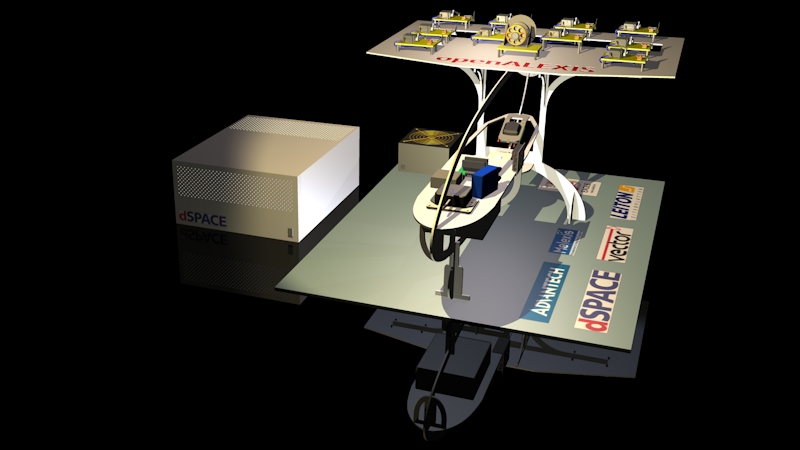
Die Entwicklung der Flugregelungsgesetze erfolgt in Matlab/Simulink. Bisher existieren hierfür die Model-in-the-Loop-(MiL)-Testumgebung, sowie ein Hardware-in-The-Loop-(HiL)-Modell mit zugehörigem Bodenprüfstand (openALEXIS). Es ist möglich das gesamte System vor den Flügen am Bodenprüfstand gefahrlos in einer HiL-Simulation zu testen. Im nichtlinearen Flugsimulationsmodell können bereits mehrere Flugbahnkurven, sogenannte Trajektorien automatisch abgeflogen werden.
Aktuell werden erste Flugversuche zur aerodynamischen Identifizierung durchgeführt. Ziel der Flüge ist die Validierung des Flugsimulationsmodells. Die Flugversuche finden auf dem Gelände des Flugmodellsportplatzes FMSC Johannisthal in Rieplos (Brandenburg) statt. Während der Identifizierungsversuche fliegt der Sicherheitspilot verschiedene zuvor definierte Flugmanöver ab, die an der Bodenstation überwacht werden. Es werden Sensordaten gesammelt, die nach dem Flug zum Abgleich von Messung und Simulation dienen und die Sensorik, Sensorsignalverarbeitung und Kalibrationsfunktionen getestet.
Im Zuge der Weiterentwicklung von ALEXISevo, verbunden mit dem Einbau des CoSMoS-Systems an allen Stellflächen, wird auch ein neuer Flügel entworfen, welcher dieses Jahr erprobt wird. Ebenfalls erprobt wird der Radar-Höhenmesser mit einer Genauigkeit von bis zu 15 Zentimetern.


Interview mit den ehemaligen Projektmitgliedern Alexander Behrens, Artaki Kalayci O und Marcus Rabe
Was hat euch dazu bewogen im Projekt mitzuarbeiten und was waren eure Aufgaben?
Behrens: Professor Luckner erwähnte während des Moduls „Einführung in die Luft- und Raumfahrt“ das Projekt. Ich war neugierig, fand es interessant und wollte praktische Erfahrung sammeln. Ich habe erst als Student freiwillig mitgearbeitet und übernahm später die technische Leitung des Projektes. Zu meinen Aufgaben zählten die Konzeption von neuen Baugruppen oder Bauteilen bis hin zu deren Konstruktion und Fertigung. So habe ich zum Beispiel den Bau unseres Radar-Höhenmessers geleitet.
Kalayci O: Mich hat ebenfalls der Praxisbezug gereizt. Neben dem Fachlichen hat mich besonders der Teamgeist beeindruckt. Wir konnten unter Freunden etwas Gemeinsames schaffen und auch abends gemütlich beisammen sein. Ich habe hauptsächlich Programmieraufgaben übernommen und bei der 3D-Vermessung des Rumpfes mitgemacht.
Rabe: Ich fand die Projektidee interessant und habe deshalb mitgemacht. Zusätzlich hatte ich auch die Möglichkeit meine Abschlussarbeit im Projekt zu schreiben. Meine Hauptaufgabe bestand im Aufbau des Hardware-in-the-loop-Simulators.
Wo arbeitet ihr derzeit und welche Fähigkeiten aus dem Projekt helfen euch dabei?
Behrens: Im Moment bin ich beim Deutschen Zentrum für Luft- und Raumfahrt in Braunschweig, in der Abteilung für Flugexperimente. Zu meinen Aufgaben gehört es, eine neue Messanlage in eine BO 105 einzubauen. Mir helfen vor allem meine Elektrotechnik-Kenntnisse. Ich untersuche existierende Schaltungen und mache Vorschläge für neue. Ich konstruiere zudem auch. Außerdem habe ich mit den flugmechanischen Modellen der BO 105 in Matlab-Simulink gearbeitet. Das haben wir bei IFSys genauso gemacht.
Kalayci O: Ich arbeite seit kurzem als Systemingenieur bei Ferchau Aviation GmbH, unter anderem am Luftdatensystem vom Eurofighter. Mir helfen zum einen meine erweiterten Programmierkenntnisse, zum anderen die Systemkenntnisse über das Luftdatensystem, das wir im Projekt entwickelt haben.
Rabe: Ich bin jetzt bei Airbus und dort Systemingenieur. Hilfreich ist vor allem das Systemdenken. Aber auch meine Praxiserfahrung in Bezug auf Entwicklungssoftware von IFSys hilft mir oft.
Wie hat euch das Projekt auf das Berufsleben vorbereitet und welche Tipps habt ihr für Studenten?
Behrens: Ich habe vor allem gelernt im Team zu arbeiten, Fristen zu setzen und einzuhalten. Aber auch, dass man manchmal geduldig sein muss. Außerdem konnte ich meine interkulturellen Kompetenzen ausbauen. Jetzige Studenten sollten sich nicht von herausfordernden Aufgaben verschrecken lassen. Die Theorie im Studium sollte mit praktischen Erfahrungen ergänzt werden, um gelerntes Wissen aus dem Hörsaal anzuwenden.
Kalayci O: Die Arbeitsweise im Team und Kommunikation untereinander sind entscheidend. Man sollte sich auch fächerübergreifend beschäftigen und sich nicht nur auf ein Aufgabengebiet fokussieren. Es ist essentiell, dass man nicht nur auswendig lernt, sondern das Gelernte auch praktisch vertieft.
Rabe: Die Theorie praktisch anzuwenden half mir ungemein. Mein Tipp: Macht mit bei IFSys!